

























我國科學家實現“雙環路”腦機“互學習”新突破
天津大學與清華大學聯合研發出一款“雙環路”腦機接口系統。此系統不僅精度更高、能耗更低,還能處理更為復雜的任務。
這款基於憶阻器神經形態器件的無創演進腦機接口系統,成功揭示了腦電發展與解碼器演化在腦機交互過程中的協同增強效應,實現了人腦對無人機的高效四自由度操控。2月17日,這一成果在最新一期《自然·電子》上刊發。

協同演進腦機接口框架。(聯合研究團隊供圖)
腦機接口能實現大腦與機器直接信息交流,促進生物智能與機器智能融合,被公認為是新一代人機交互和人機混合智能的核心技術。如何通過腦機之間的信息交互實現“互學習”,進而促進腦機智能的協同演進,是突破腦機性能瓶頸的重點和難點。但目前腦機交互過程中大腦與機器的動態耦合機制尚未厘清,導致腦機之間的長時程互適應能力較弱,工作性能隨時間顯著下降。
天津大學與清華大學的聯合研究團隊針對這一難題,發現腦電信號的非平穩特性與任務腦電演變密切相關。基於此,他們創新性地提出了“雙環路腦機協同演進框架”,並通過憶阻器神經形態器件加以實現。在“雙環路”框架下,腦與機的學習環路相互協同,共同促進系統性能的提升。
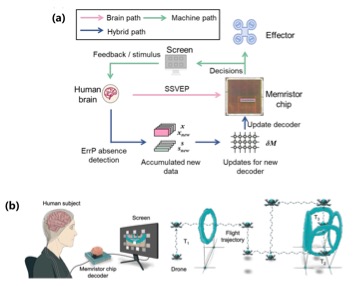
(a)腦-憶阻器交互式更新框架;(b)基於憶阻器腦電解碼的實時腦控無人機飛行。(聯合研究團隊供圖)
實驗結果顯示,新方案相較於傳統方案,解碼速度大幅提升,能耗顯著降低。更令人矚目的是,在連續6小時的長時程交互實驗中,系統性能不僅保持穩定,准確率還提升了約20%。這一成果無疑為腦機接口技術的實用化奠定了堅實基礎。
天津大學腦機海河實驗室教授許敏鵬表示,這項研究不僅實現了生物智能與機器智能的互適應、互學習,還為未來腦機接口系統的發展提供了重要的理論基礎與技術支撐。他透露,團隊計劃將這一系統拓展至更多便攜式或可穿戴設備中,以滿足不同場景下的智能人機交互需求。
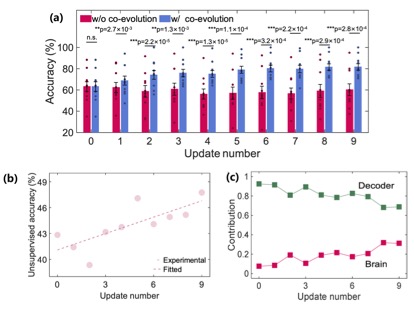
(a)協同演進腦機解碼正確率較初始狀態提高20%﹔(b)任務相關腦電特征發生正向演化﹔(c)腦與憶阻器解碼器實現互適應。(聯合研究團隊供圖)
據了解,此研究由天津大學與清華大學團隊合作開展:天津大學腦機海河實驗室團隊完成協同演進腦機接口軟件系統設計與范式算法實現,清華大學集成電路學院團隊完成協同演進憶阻器神經形態器件硬件設計及憶阻器算法設計部署。

分享讓更多人看到 
人民日報社概況| 關於人民網| 報社招聘| 招聘英才| 廣告服務| 合作加盟| 版權服務| 數據服務| 網站聲明| 網站律師| 信息保護| 聯系我們
人民日報違法和不良信息舉報電話:010-65363263 舉報郵箱:jubao@people.cn
人民網服務郵箱:kf@people.cn 違法和不良信息舉報電話:010-65363636 舉報郵箱:rmwjubao@people.cn
互聯網新聞信息服務許可証10120170001 | 增值電信業務經營許可証B1-20060139 | 廣播電視節目制作經營許可証(廣媒)字第172號 | 京ICP備12004265號-13
信息網絡傳播視聽節目許可証0104065 | 網絡文化經營許可証 京網文[2023]4961-141號 | 網絡出版服務許可証(京)字121號 | 京ICP証000006號 | 京公網安備11000002000008號
人 民 網 股 份 有 限 公 司 版 權 所 有 ,未 經 書 面 授 權 禁 止 使 用
Copyright © 1997-2025 by www.people.com.cn. all rights reserved



-
評論

-
關注
微信微博快手
 第一時間為您推送權威資訊
第一時間為您推送權威資訊
 報道全球 傳播中國
報道全球 傳播中國
 關注人民網,傳播正能量
關注人民網,傳播正能量
