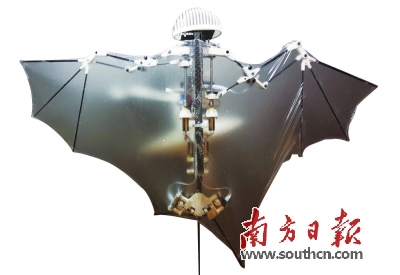

一隻能夠自主飛行的蝙蝠機器人登上了《科學·機器人學》的封面。研究團隊報告說,他們模仿蝙蝠的生理結構,用新型材料制造出了這種機器蝙蝠。它體型較小,重約93克,翼展約47厘米,能夠像蝙蝠一樣飛翔。
事實上,雖然四軸飛行器在無人機領域已有廣泛應用,但仍然遠遠比不上大自然“制造”的飛行生物,例如鳥類和蝙蝠。特別是蝙蝠,其飛行機制,在動物中是最復雜之一,模仿其結構的“蝙蝠機器人”能夠適應普通四軸飛行器無法施展的特殊環境,用途廣泛。
值得注意的是,《科學·機器人學》系頂級學術刊物《科學》雜志的子刊,於去年12月創刊。在人工智能如火如荼的今天,雜志對“蝙蝠機器人”的報道,向我們強調了機器人學的另一大分支——仿生機器人。
有專家指出,傳統仿生機器人存在“形似而神不似”的問題。目前,學界正向著剛柔混合結構,仿生結構、材料、驅動一體化,神經元精細控制,高效能量轉換的類生命系統方向發展。近年也出現了機器蒼蠅、機器蝴蝶等一大批或應用前景廣泛、或設計概念新穎的仿生機器人。
亮點:“蝙蝠機器人”可實現自主飛行
同樣是飛行生物,蝙蝠的飛行能力比鳥類難以模仿得多:不同於鳥類翅膀由中空骨頭支撐的簡約結構,作為哺乳動物的蝙蝠,其翅膀由堅實的骨頭、關節和皮膚組成。科學家發現,蝙蝠的翅膀極其靈活,擁有超過40個關節,科學家稱之為“40個自由度”。
“蝙蝠的飛行能力是空中機器人夢寐以求的。它能執行復雜的飛行技能,比如顛倒棲息和快速轉彎。蝙蝠還有非常復雜的機翼運動,有超過40個關節和非常薄的膜翅膀。”論文的通訊作者、加州理工學院教授Soon—Jo Chung說。
因為這些靈活的關節,科學家發現,蝙蝠能夠通過類似“曲肘”或“翻腕”的動作控制向前或向后飛行。而且,在每個翼跳周期期間,有些骨骼會隨著翅膀扇動變形,以控制飛行姿態。相較於鳥類,蝙蝠具有難以置信的機動性,可用翅膀攔截昆虫。更早的時候,一項來自美國南加利福尼亞大學的研究顯示,一般鳥類通常隻借助雙翼向下運動產生升力,而蝙蝠在飛行時,雙翼向上運動同樣可以產生升力。
蝙蝠靈活的翅膀令科學家贊嘆不已,但制造“蝙蝠機器人”也因此變得十分困難,對機器人建模、設計和控制提出了大量技術挑戰。來自美國伊利諾伊大學厄巴納—香檳分校和加州理工學院的科研團隊經過數年探索,於去年研制了名為Bat Bot(B2)的“蝙蝠機器人”,並登上了2017年2月份最新一期的《科學·機器人學》封面。
由於種種限制,研究團隊並沒有完全模仿蝙蝠的翅膀結構,他們隻參考了蝙蝠的5個自由度:肘部、肩部、腿部、腕部和尾部的運動。雖然與蝙蝠相去甚遠,但團隊認為,“蝙蝠機器人”可以復制蝙蝠57%以上的飛行動作。
最令人眼前一亮的是,“蝙蝠機器人”的飛行無需遠程操作,而是通過機載計算機和幾個傳感器控制,根據不同環境自主導航。Soon—Jo Chung介紹,為實現“蝙蝠機器人”自主飛行,它採用機載的定制電子部件,導航和控制算法在主控板上實時運行,而處理傳感器數據和控制制動器用的是單獨的數據採集器。傳感器包含一個慣性測量裝置(IMU)和五個位於肘部、臀部和翅膀關節處的磁編碼器。
Soon—Jo Chung表示,目前“蝙蝠機器人”已可以成功直飛30米,其通過調節左右翼和尾部的關節,使薄膜變形,從而達成自主飛行。這些關節都有復雜的算法進行協調,使得機器人可以如同蝙蝠一般飛行,包括傾斜盤旋和俯沖。
“相較於四軸飛行器,‘蝙蝠機器人’具有許多實際優勢:在有人環境中,‘蝙蝠機器人’柔軟的翅膀是最顯著優勢。它不會像四軸飛行器或者其他旋翼航空器那樣,因其剛性材料的螺旋槳和高噪音對人類構成潛在危害。相比之下,翼部主要由柔性材料構成的‘蝙蝠機器人’即使碰撞,也不會對自身和障礙物造成很大損壞,而且較低頻率的翅膀扇動也會降低噪音。”發表於《科學·機器人學》的論文這樣描述其優勢。
報告稱,“蝙蝠機器人”的機翼由具有高延展性的柔性硅膠膜制成,隻有56微米厚﹔而骨架由碳纖維構成﹔整體重約93克,翼展約47厘米。
科研團隊希望,這種高度靈活機動的機器人能夠替代四旋翼無人機成為人類的好幫手,它的機翼可以變成任何形狀以在建筑勘測中避開橫梁,或者在危險地域進行偵查幫助救災。
當然,“蝙蝠機器人”的研究剛剛起步。研究人員表示,目前的機器人飛行時間受電池容量的限制,而且現在還太易破損,暫時還不能投入生活中使用。論文還提到,研究人員正在研究如何讓“蝙蝠機器人”倒立。
評點:人造物仍無法與飛行生物媲美
飛鳥、昆虫以及哺乳動物中的蝙蝠等在上億年進化歷史中,經過不斷適應環境和優化選擇,其在形態、運動方式、能量利用等方面,達到了幾乎完美的程度,為空中仿生機器人的設計提供了很好的借鑒。
甚至到今天,雖然人類能夠造出以數馬赫巡航的固定翼飛機,但在精細飛行方面,人造物仍無法與大自然“制造”的飛行器相媲美。在飛機設計領域,“隻要推力大,板磚飛上天”這句頗具冷幽默的話經常被愛好者乃至從業人員挂在嘴邊,其反映了人造飛行器的某種發展方式:通過強大的動力來補償空氣動力學的缺陷。
這就導致一個問題:傳統的固定翼飛機尺寸和飛行速度降低到一定數量級時,其產生的升力就不足以維持飛行﹔旋翼型飛機雖然能夠微型化,但是機動性方面仍達不到人們要求,距離鳥類乃至蝙蝠更相去甚遠。
雖然人類到目前為止還沒有開發出任何一款可以和鳥類或昆虫相媲美的扑翼飛行器,但扑翼飛行卻是已被大自然所驗証的完美飛行模式。
例如,時速達3馬赫的SR—71超音速飛機,每秒可飛過32倍的機身長度。然而,當一隻普通鴿子以80km/h的正常速度飛行的時候,已達到自身體長的75倍,某些雨燕甚至可以達到每秒140倍﹔在機動性方面,高機動作戰飛機(如A—4Skyhawk攻擊機)的滾轉速率大約是每秒720°,而燕子卻可超過每秒5000°,急停、避障、倒飛等特技動作更讓人造飛行器望塵莫及﹔在穩定性和機動飛行方面,人造飛行器根本無法在強氣流中飛行,並且隻能在特定條件下做出特定機動動作,而鳥類和昆虫不斷重復著下拍和上揮的扑翼動作,有些頻率甚至高達1000Hz,但其自身卻具有極好的穩定性和機動性,能迅速對外界變化作出反應﹔人造飛行器的失速迎角最大在15°左右,而一些昆虫的失速迎角卻可以達到60°。華南理工大學機械與汽車工程學院博士陳亮認為,飛行生物的這種優異性能,人類目前還無法完全模仿,還有大量隱藏在其后的原理、規律沒有被人類所認識。
人類最早嘗試飛行時,的確試圖模仿鳥類。15世紀,達·芬奇在他的手稿中設計了一個由人力驅動的扑翼模型,被認為是迄今為止最早的設計扑翼飛行器構思。所謂“扑翼”,即如鳥類、昆虫乃至蝙蝠等拍打翅膀進行飛行。
但載人扑翼飛機至今未有長距飛行成功的先例。在1991年的多倫多大學載人扑翼機實驗失敗后,有學者分析認為,在扑翼飛行器設計中,重量和尺寸立方成正比:當實驗飛機增加了駕駛人員和操縱設備后,重量增大了76倍,而飛行器尺寸只是變成原來的4倍,增加的升力遠遠不能平衡增加的重量,所以不能真正實現飛行。到目前為止,扑翼飛行器幾乎沒有載人方向的研究。
自20世紀以來,微型扑翼飛行器逐漸吸引研究者的關注。陳亮認為,早期對扑翼飛行器的研究主要集中在機構、運動姿態、外觀等的簡單模仿上,而對扑翼氣動特性的研究則開展較少。
難點:扑翼飛行應用,缺理論等支撐
陳亮指出,近年來,雖然在實物樣機和理論分析方面取得了初步的成果,但要想完全理解扑翼飛行的高升力機理,並將其應用到人造飛行器領域,目前仍存在巨大挑戰。
“僅就扑翼運動規律而言,看似周期性上下扑動,實際上還疊加了俯仰、扭轉、折疊及復雜的柔性變形,這是一種極其復雜的空間運動,翼面上每一點的氣動力都是隨時間和空間位置而變化的。”陳亮認為。
另外,他還指出,扑翼飛行模式在氣動力特性的很多方面與其它飛行模式存在明顯區別,不同生物在幾何結構和運動模式上也存在很大差異,“很難用統一的理論對其描述。總體而言,有關扑翼飛行機理的研究還很不完善。”陳亮在其博士論文中寫道。
陳亮認為,仿生扑翼機器人涉及仿生學、非定常空氣動力學、微機械學、微電子學等多個先進學科,而人類對這些學科的研究目前還處於初始階段。其中,核心問題在於,“傳統的穩態空氣動力學理論在解釋鳥類和昆虫扑翼飛行原理的時候遇到了極大障礙,採用傳統理論計算得出的升力根本不能夠克服飛行生物自身的重量”。
而事實上,通過對鳥類和昆虫飛行能力的大量觀察表明,飛行生物扑動翅膀時所產生的非定常升力,往往達到定常值的2—3倍,不僅能完全用來平衡昆虫的體重,還可以用來實現極其復雜的高難度機動飛行。
除了理論方面尚待突破外,仿生扑翼機器人還存在材料和能源的問題。陳亮介紹,蜻蜓、蒼蠅等昆虫的翅膀都是由質量非常輕的網狀架構和薄膜材料構成,對於這類超輕質、高強度、高柔性生物材料的組成、理化方式和機械性能,我們尚缺乏足夠了解。
國家自然科學基金委工程與材料科學部副主任王國彪在關於仿生機器人研究現狀的綜述中提到,國內研究人員也始終關注空中仿生機器人的發展動態,在這方面的基礎理論和應用上做了大量的研究工作。其中南京航空航天大學通過非定常渦格法的計算,分析仿鳥復合振動的扑翼氣動特性,並且據此制作了幾種不同大小和形式的仿鳥扑翼飛行器。
王國彪還表示,北京航空航天大學長期從事昆虫飛行理論研究,通過試驗觀測、理論計算、模擬仿真的方法研究昆虫飛行、懸停、轉彎等動作的實現機理,為微型扑翼飛行器的設計提供了理論依據。
如何做成的?
“蝙蝠機器人”的機翼由具有高延展性的柔性硅膠膜制成,僅56微米厚﹔而骨架由碳纖維構成﹔整體重約93克,翼展約47厘米。
有何獨特性?
目前,“蝙蝠機器人”可以成功直飛30米,其通過調節左右翼和尾部的關節,使薄膜變形,從而達成自主飛行。這些關節都有復雜的算法進行協調,使得機器人可以如同蝙蝠一般飛行,包括傾斜盤旋和俯沖。
能有啥作用?
能夠替代四旋翼無人機成為人類的好幫手,它的機翼可以變成任何形狀以在建筑勘測中避開橫梁,或者在危險地域進行偵查幫助救災。
未來會怎樣?
傳統仿生機器人存在“形似而神不似”的問題。目前,學界正向著剛柔混合結構,仿生結構、材料、驅動一體化,神經元精細控制,高效能量轉換的類生命系統方向發展。
延伸:那些神奇的仿生機器人
1 機器蒼蠅
2013年,哈佛大學團隊研制出“機器蒼蠅”,重80毫克,翼展僅3厘米,翅膀振動頻率為每秒120次。其飛行運動原理和蒼蠅非常相似,可像蒼蠅一樣在空中懸停、轉彎﹔而且,其左右翅膀可單獨控制,極大地提升靈活度。
但“機器蒼蠅”尚無法解決電源問題:因現有電源最輕的也達到了0.5克,是機器蒼蠅體重的數倍,所以目前隻能用一根超輕銅線給機器蒼蠅供電,這根線同時用於傳遞控制信號。
2 機器魚
水下仿生機器人是從模仿魚類游動開始的,從最初利用電機驅動機械系統模仿魚類尾部的擺動實現推進。推進模式從早期的身體/尾鰭推進(BCF)發展到中鰭/對鰭推進(MPF),提高了仿生機器人的推進效率和機動性。
3 機器蛇
蛇形機器人由於其細長的形體結構以及獨特的運動方式,能夠跨越窄溝和進入空洞,具有很強的環境適應性和地面運動穩定性。經過幾十年研究,蛇形機器人由最初實現仿蛇的基本運動,發展到具有避障、攀爬、翻滾以及水中游動等多種功能,並具備一定環境感知能力。(記者 王詩?)



 "裝馬匹"鬧街頭
"裝馬匹"鬧街頭

